Stochastic Optimal Motion Planning based on Model Predictive Path Integral
Stein Variational Guided Model Predictive Path Integral Control: Proposal and Experiments with Fast Maneuvering Vehicles (ICRA, 2024)
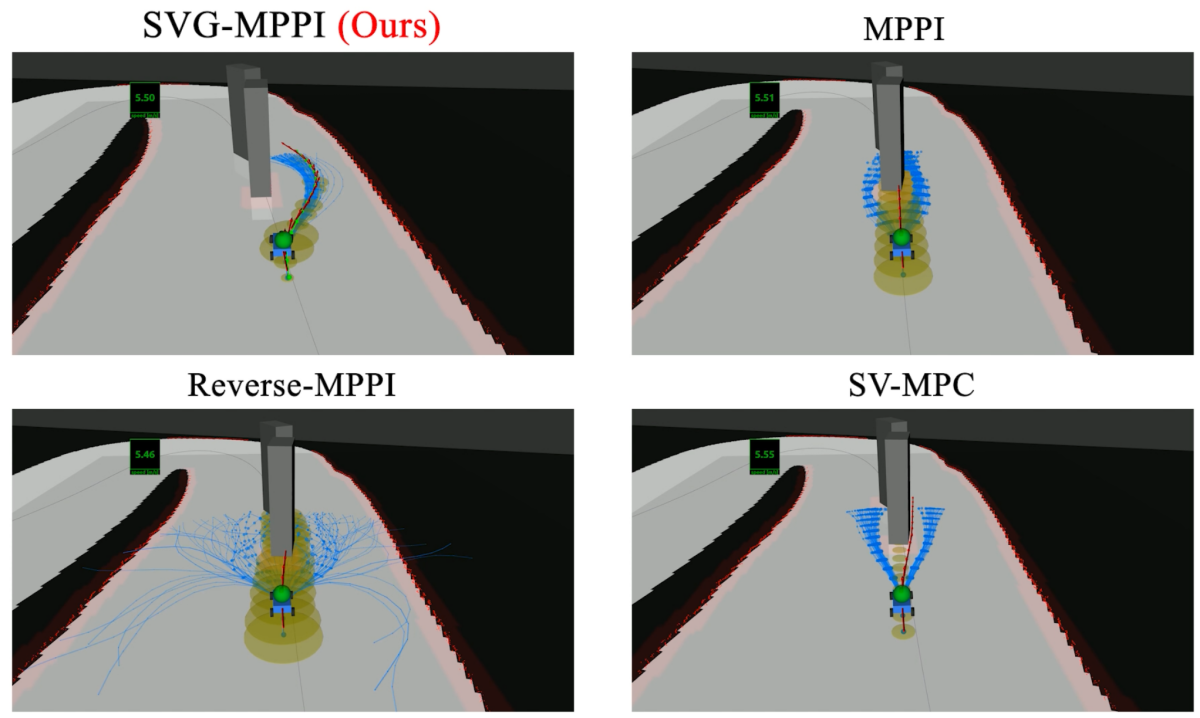
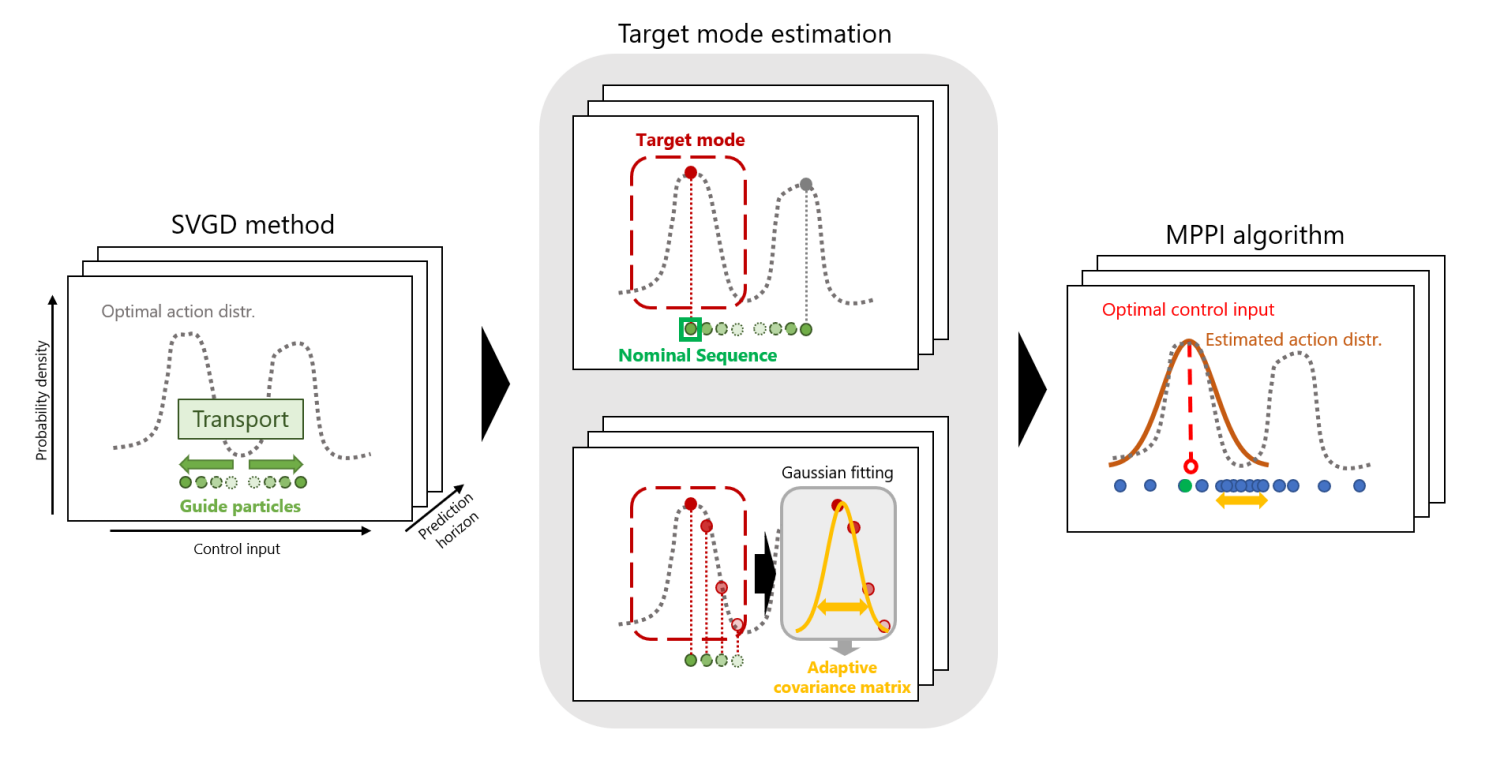
This study presents a novel Stochastic Optimal Control (SOC) method based on Model Predictive Path Integral control (MPPI), named Stein Variational Guided MPPI (SVG-MPPI), designed to handle rapidly shifting multimodal optimal action distributions. While MPPI can find a Gaussian approximated optimal action distribution in closed form, i.e., without iterative solution updates, it struggles with multimodality of the optimal distributions, such as those involving non-convex constraints for obstacle avoidance. This is due to the less representative nature of the Gaussian. To overcome this limitation, our method aims to identify a target mode of the optimal distribution and guide the solution to converge to fit it. In the proposed method, the target mode is roughly estimated using a modified Stein Variational Gradient Descent (SVGD) method and embedded into the MPPI algorithm to find a closed-form “mode-seeking” solution that covers only the target mode, thus preserving the fast convergence property of MPPI. Our simulation and real-world experimental results demonstrate that SVG-MPPI outperforms both the original MPPI and other state-of-the-art sampling-based SOC algorithms in terms of path-tracking and obstacle-avoidance capabilities.
