IEEE ICRA, 2024
IEEE RA-L, 2022
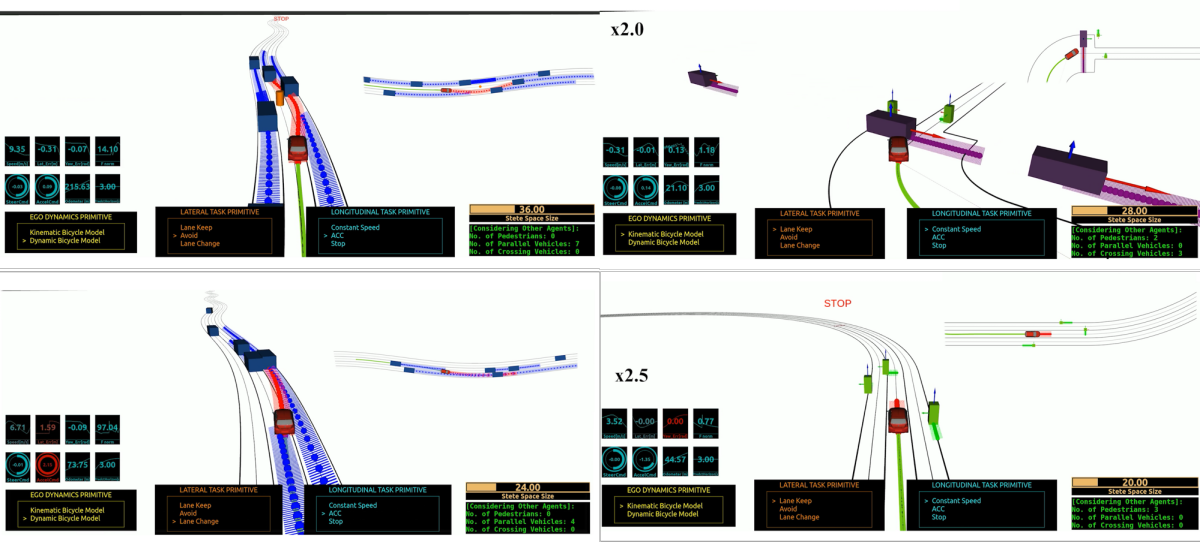
Ph.D. Dissertation, IEEE IV / ITSC / IROS late breaking, Asian Journal of Control, 2020-2023