Projects
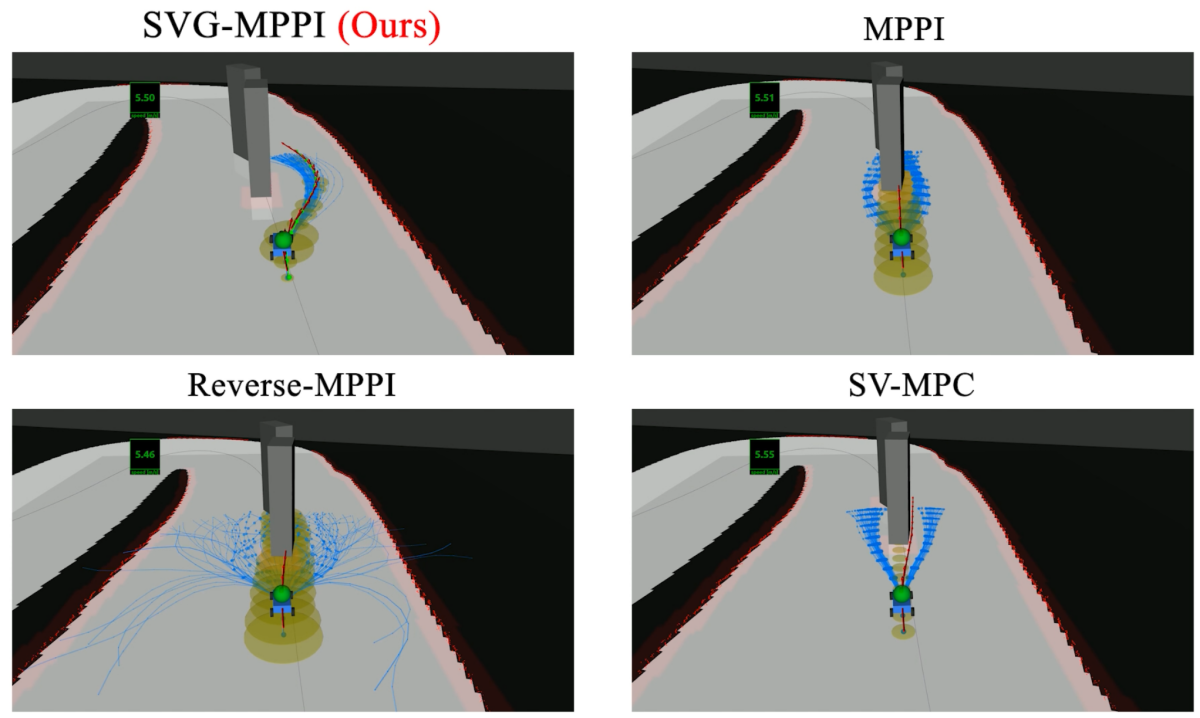
Stochastic Optimal Motion Planning based on Model Predictive Path Integral
IEEE ICRA, 2024
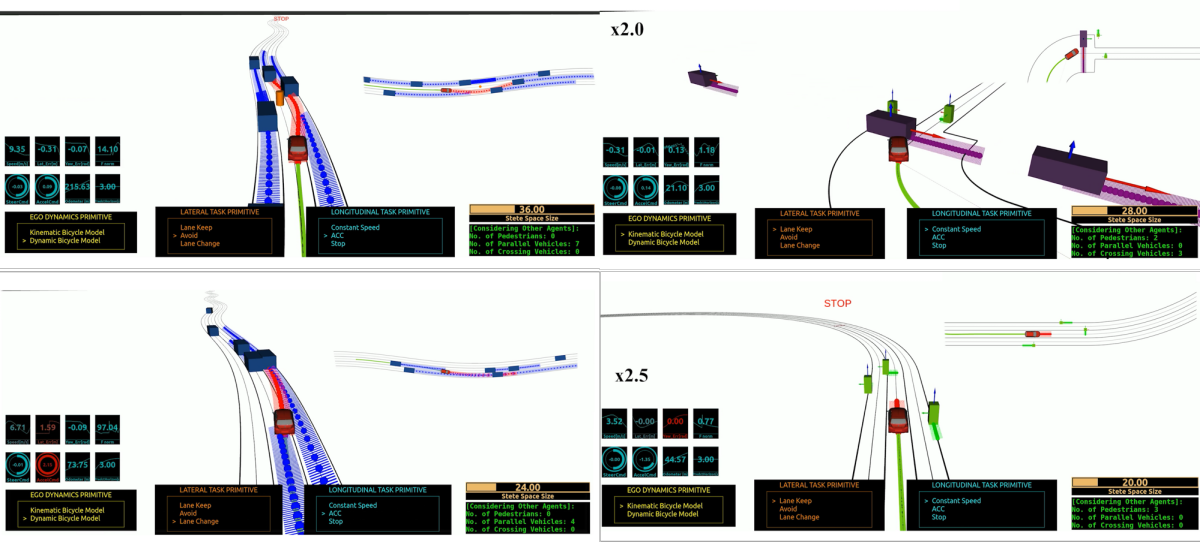
Generation of Diverse Autonomous Driving Behaviors Using Model Predictive Control
Ph.D. Dissertation, IEEE IV / ITSC / IROS late breaking, Asian Journal of Control, 2020-2023
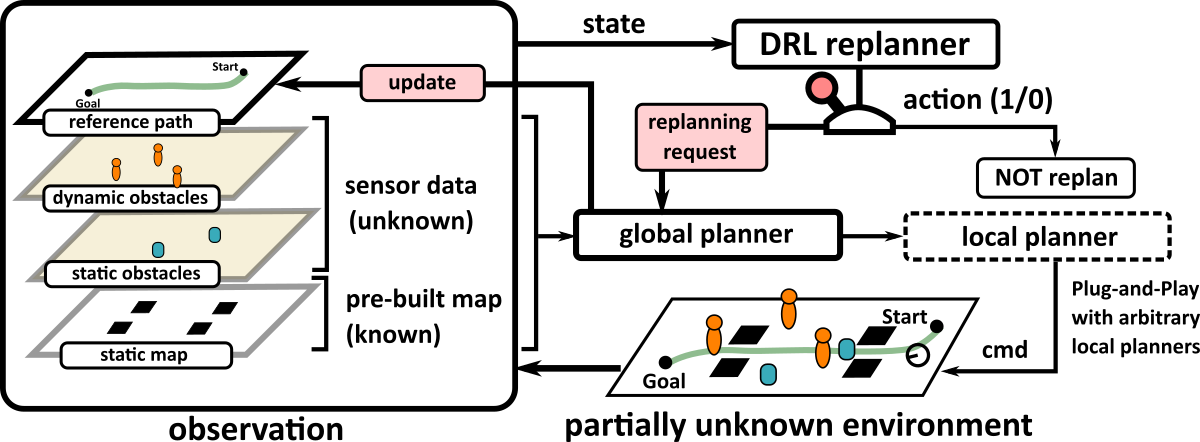
Autonomous Mobile Robot Navigation with Deep Reinforcement Learning
IEEE ICRA, 2024
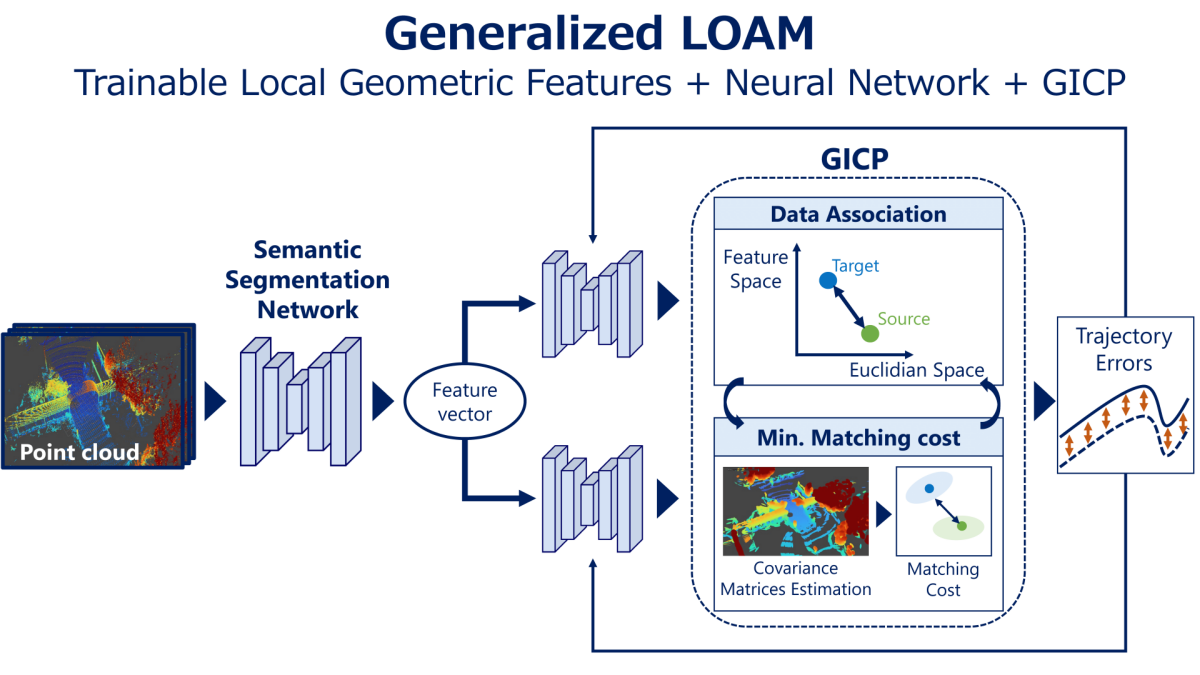
Integration of Model-based and Learning-based Methods for SLAM
IEEE RA-L, 2022